Nous poursuivons avec la deuxième partie de l’article sur le balayage laser des circuits de compétition pour leur utilisation dans les simulateurs de conduite.
SL Statiques et Mobiles. La méthode statique dans les vidéos d’iRacing
Parlons maintenant un peu de la méthodologie de terrain utilisée avec les SL. Il existe des SL Statiques et Mobiles.
Ceux utilisés par l’équipe d’iRacing dans les vidéos liées sont Statiques. Cela est déjà expliqué dans ces vidéos, mais en gros, il faut comprendre que les SL Statiques sont montés sur un trépied et, depuis chacune de ces bases, ils effectuent un balayage de tout ce qui les entoure, couvrant 360º horizontalement et 270º-300º verticalement vers le haut. Ainsi, le long du circuit, le SL est placé à différentes positions, restant statique à chacune d’elles jusqu’à ce que le balayage depuis cette position soit terminé. La méthodologie généralement appliquée (également par l’équipe d’iRacing) utilise une série de cibles sphériques placées stratégiquement le long des prises, de sorte que d’une station à la suivante, le SL voit et mesure ces cibles. Celles-ci servent de points de contrôle géométrique et de géoréférencement. En termes simples, c’est ce qui permet à chaque nuage de points obtenu depuis chaque base ou station du SL d’être organisé par la suite pour former l’ensemble des points du circuit.
Pour mieux comprendre, ajoutons que lorsque nous transférons les nuages de points de chaque balayage sur l’ordinateur, ils sont initialement dans des positions arbitraires, désordonnés les uns par rapport aux autres, et ces points communs, ou cibles, sont utilisés pour les aligner jusqu’à ce qu’ils soient disposés dans leur véritable position spatiale. Cet alignement se fait en 3D. Cela se fait au bureau avec un logiciel spécifique. Il existe également différents méthodes ici. Certains logiciels plus avancés ne nécessitent pas de cibles, mais analysent les informations et la position relative des points pour détecter des « formes communes » et effectuer l’alignement, car ils sont équipés de boussoles et de GPS qui garantissent que les prises ne sont pas totalement arbitraires mais conservent une certaine orientation – pas précise, mais suffisante pour que le logiciel puisse effectuer un ajustement fin semi-automatique. Cependant, sur les circuits, qui sont des espaces très ouverts, l’utilisation de cibles est courante. Si tout le processus n’est pas réalisé avec la rigueur et le contrôle géométrique positionnel nécessaires pour ce type de relevé longitudinal – souvent de plusieurs kilomètres de long et avec des dénivelés importants dans de nombreux cas – peu importe la précision relative offerte par le SL, le relevé topographique peut manquer de rigueur, nécessitant des retouches ou ajustements manuels qui aboutiront à un travail peut-être très « impressionnant », mais peu fidèle à la réalité.
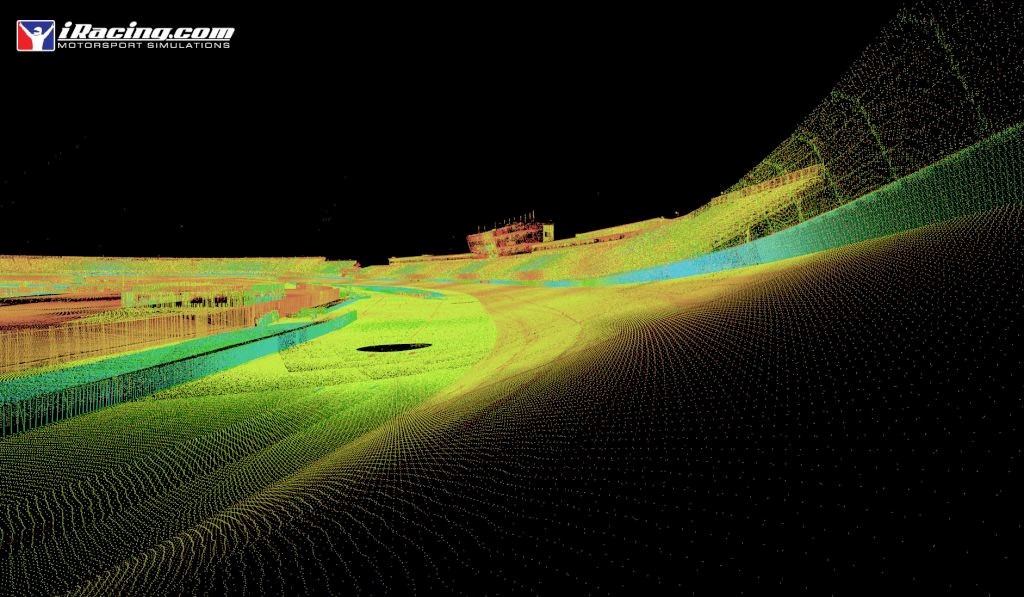
Pour relever un circuit de 2 km avec cette méthode, il faut stationner le SL sur environ 35 bases, capturant 15 à 30 millions de points par station, soit un total de 600 à 1000 millions de points, chacun avec ses coordonnées XYZ, sa réflectance et/ou sa tonalité RGB, générant un nuage de points dans l’espace qui, grâce à sa haute résolution et qualité, constitue en lui-même un modèle graphique 3D parfaitement mesurable et interprétable.
À notre avis, iRacing a utilisé un flux de travail excellent, au sens d’optimal. Matériel, logiciel, méthodologie et coûts équilibrés pour ce type de projet, garantissant avec cette combinaison une très haute qualité topographique du nuage de points. Ils ont utilisé une méthode statique « traditionnelle » avec des cibles, plus lente sur le terrain, mais qui permet de garantir des résolutions constantes et un nuage de points avec une précision géométriquement très contrôlée.
SL Mobiles
Nous avons récemment lu et entendu que d’autres simulateurs annoncent que certains de leurs circuits ont été ou sont en cours de relevé avec des systèmes SL. Le premier problème est que lorsque nous recherchons des données sur ces projets sur leurs sites web ou ailleurs, nous ne trouvons presque rien. Ils n’expliquent ni les procédures, ni les équipements utilisés, etc. Ils se contentent d’indiquer qu’ils ont utilisé des SL comme si cela en soi était une garantie. Ici, je vais parler des systèmes SL Mobiles, car ce que nous avons pu trouver accompagnant certaines de ces annonces est une photo montrant un véhicule équipé de ce type de système.
D’une part, nous pensons que les caméras qu’ils transportent sont des caméras vidéo, pas des caméras photographiques ; d’autre part, il y a une antenne GPS topographique, et enfin, à l’arrière – bien qu’il soit difficile à identifier sur ces prises – le dispositif SL proprement dit. L’aspect de l’ensemble, avec un seul SL, la disposition des caméras vidéo et l’absence apparente d’un second GPS pour mieux contrôler les trajets, ainsi que l’absence (également apparente) d’un odomètre – essentiel dans ces systèmes pour enregistrer la distance exacte parcourue – suggèrent qu’il s’agit d’un système SL Mobile de coût moyen à faible, plus rapide que les systèmes statiques, évidemment, mais incapable d’atteindre ou de garantir la précision positionnelle et topographique de ces derniers.
Balayage Laser de Nürburgring
Il en va de même pour les images suivantes. D’après ce que nous savons, c’est le système utilisé pour scanner le circuit de Nürburgring Nordschleife. On y voit un système plus puissant, avec deux SL à l’arrière disposés en forme de « V », mais nous remarquons en revanche que leur orientation est horizontale, c’est-à-dire que l’axe de rotation du système optique du SL est parallèle au sol, de sorte que les balayages ne garantissent pas une capture précise des éléments verticaux. Cette disposition n’est plus utilisée dans les systèmes de pointe, qui présentent généralement la même configuration en « V », mais avec les deux lasers inclinés par rapport à l’horizontale. L’objectif de cette inclinaison est de s’assurer que le plan de « tranchage » formé par le laser coupe en diagonale – et non verticalement – les éléments qu’il rencontre. Si cette coupe est verticale, il est impossible de garantir que la représentation du début et de la fin des éléments ou surfaces verticales soit correctement positionnée et définie. De plus, ces images montrent à nouveau des caméras vidéo plutôt qu’un système photographique, ce que les systèmes les plus puissants (et coûteux) utilisent.
Bien que ce relevé de Nürburgring Nordschleife soit un projet relativement récent, nous pensons qu’il s’agit d’un système SL Mobile non de pointe, qui, comme le précédent, n’atteint pas les garanties et la précision métrique absolue du système statique utilisé par iRacing.
Nous avons lu sur un forum que l’équipe d’iRacing a utilisé l’un de ces systèmes Mobiles pour relever le circuit d’Imola, mais nous manquons de détails et ne savons pas si c’est vrai, quel équipement ils ont utilisé exactement, ni quels résultats ils ont obtenus par rapport au système statique.
Le cas du relevé du circuit de Nürburgring Nordschleife est atypique. D’après ce que nous avons pu découvrir, ce n’est pas l’entreprise du simulateur qui a réalisé le relevé ; c’est le circuit lui-même qui l’a commandité pour ensuite le proposer aux simulateurs qui souhaitent l’intégrer. C’est une démarche très intelligente, car le circuit réalise un investissement qui contribuera sans doute à accroître sa présence sur le marché des circuits et à attirer d’autres pilotes ou simracers à le découvrir et à le visiter pour y courir. Nous déduisons qu’ils n’ont pas opté pour le système statique en raison de sa plus grande lenteur et de l’occupation de la piste, d’autant plus que ce circuit est très long (21 km) et topographiquement complexe. Nous trouvons également surprenant que, pour un investissement de cette envergure, les marques leaders en systèmes de cartographie mobile n’aient pas été impliquées, mais faute de plus de données, nous ne pouvons pas en dire davantage.
Ceci dit, on pourrait penser que les systèmes SL Mobiles sont moins fiables que les Statiques, mais ce n’est pas exactement ce que nous voulons souligner. Comme nous l’avons mentionné plus tôt à propos des systèmes statiques, le contrôle positionnel du SL doit être garanti avec précision tout au long du parcours, et cet aspect est encore plus délicat et complexe à gérer dans les systèmes mobiles, raison pour laquelle, s’ils ne sont pas équipés de matériel complémentaire de la plus haute qualité, leurs résultats d’un point de vue topographique peuvent être discutables – peut-être valables pour un jeu de simulation, mais pas pour un simulateur destiné également à servir d’outil d’entraînement professionnel.
Autres SL Mobiles
Il existe des systèmes hybrides où le SL fonctionne comme un statique, mais est transporté sur un véhicule qui s’arrête à intervalles réguliers. Ces systèmes introduisent encore plus d’incertitudes que les précédents, mais ont également été utilisés par certains jeux de course. Nous ne fournirons ni images ni détails supplémentaires, car les informations à ce sujet sont très dispersées et pourraient mettre certains dans une position délicate, mais dans beaucoup de ces sources, on parle trop légèrement de précisions millimétriques.
Il existe aussi des systèmes SL Mobiles qui offrent des garanties topographiques de hautes performances. Par exemple, le système MX2 de Trimble, qui embarque un équipement complet : systèmes IMU et DMI, deux systèmes GNSS et un système photographique central, permettant ensemble de contrôler et de synchroniser tous les enregistrements, offrant des garanties métriques et positionnelles dans un système mobile.
Trimble n’est pas le seul à proposer ce type d’équipement, mais c’est l’une des marques leaders dans cette gamme de produits, et son MX2 est un exemple clair de système SL Mobile fiable. Leica propose également un équipement pour cette gamme de services, le Pegasus.
(À suivre...)