We continue with the second part of the article on laser scanning of racing circuits for use in driving simulators.
Static and Mobile LS. The Static Method in iRacing Videos
Let’s now talk a bit about the field methodology used with LS. There are Static and Mobile LS.
The ones used by the iRacing team in the linked videos are Static. This is already explained in those videos, but basically, we should understand that Static LS are mounted on a tripod and, from each of these bases, they perform a sweep of everything around them, covering 360º horizontally and 270º-300º vertically upward. Thus, along the circuit, the LS is placed in different positions, remaining static at each one until the sweep from that position is complete. The methodology typically applied (also by the iRacing team) uses a series of spherical targets strategically placed along the scans, so that from one station to the next, the LS sees and measures these targets. These act as geometric control and georeferencing points. In simple terms, this is what allows each point cloud obtained from each LS base or station to be organized later to form the entire block of circuit points.
To better understand this, consider that when we transfer the point clouds from each scan to the computer, they are initially in arbitrary positions, disordered relative to one another, and these common points, or targets, are used to align them until they are arranged in their true spatial position. This alignment is in 3D. This is done in the office using specific software. There are different methods here too. Some more advanced software doesn’t require targets but analyzes the information and relative position of the points to detect “common shapes” and perform the alignment, as they include compasses and GPS that ensure the scans aren’t entirely arbitrary but retain a certain orientation—not precise, but sufficient for the software to perform a semi-automatic fine adjustment. However, in circuits, which are very open spaces, targets are typically used. If the entire process isn’t carried out with the necessary rigor and positional geometric control for this type of longitudinal survey—often several kilometers long and with significant elevation changes in many cases—no matter how much relative precision the LS provides, the topographic survey can end up lacking rigor, requiring manual tweaks or adjustments that result in a work that might be very “impressive” but not faithful to reality.
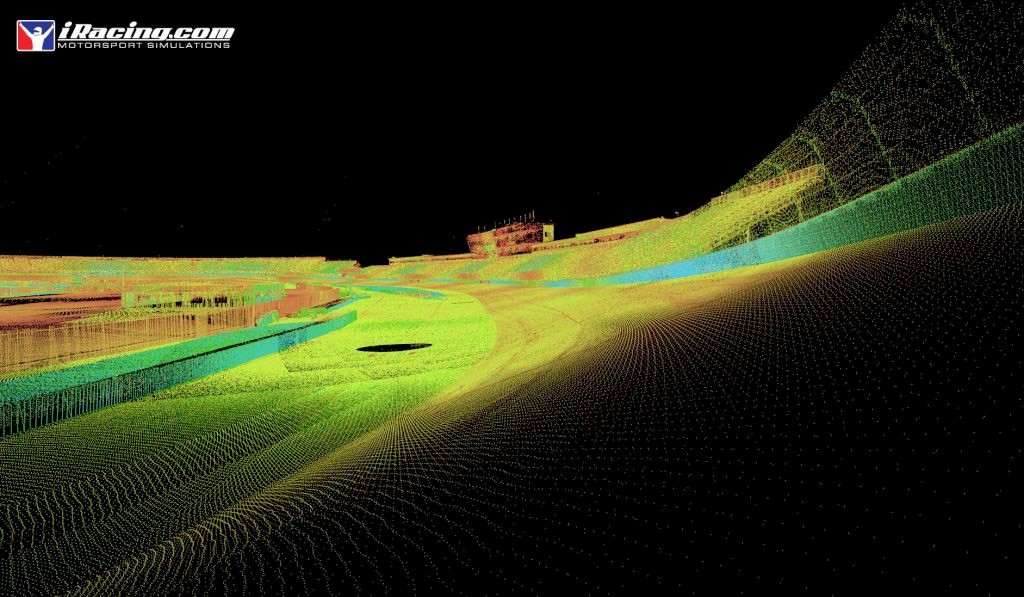
To survey a 2 km circuit using this method, the LS needs to be stationed at approximately 35 bases, capturing 15-30 million points per station, totaling between 600 and 1000 million points, each with its XYZ coordinates, reflectance, and/or RGB tone, generating a point cloud in space that, due to its high resolution and quality, forms a perfectly measurable and interpretable 3D graphic model on its own.
In our opinion, iRacing has used an excellent workflow, in the sense of being optimal. Hardware, software, methodology, and balanced costs for this type of project, ensuring a very high topographic quality of the point cloud with this combination. They’ve used a “traditional” static method with targets, slower in the field, but one that guarantees consistent resolutions and a point cloud with geometrically well-controlled precision.
Mobile LS
We’ve recently read and heard that other simulators claim some of their circuits have been or are being surveyed with LS systems. The first issue is that when we search for data about these projects on their websites or elsewhere, we find almost nothing. They don’t explain the procedures, the equipment used, etc. They simply state they’ve used LS as if that alone were a guarantee. Here, I’ll talk about Mobile LS systems, as what we have managed to find accompanying some of these claims is a photo showing a vehicle equipped with this type of system.
On one hand, we believe the cameras they carry are video cameras, not photographic ones; on the other, there’s a topographic GPS antenna, and finally, at the back—though it’s hard to identify in these shots—the actual LS device. The appearance of the setup, with only one LS, the arrangement of the video cameras, and the apparent lack of a second GPS to better control the routes, as well as the seeming absence of an odometer—essential in these systems to record the exact distance traveled—suggest this is a mid-to-low-cost Mobile LS system, faster than static systems, obviously, but unable to achieve or guarantee the positional and topographic precision of the latter.
Laser Scanning of Nürburgring
The same applies to the following images. From what we know, this is the system used to scan the Nürburgring Nordschleife circuit. In them, we see a more powerful system, now with two LS units at the rear arranged in a “V” shape, but we note, conversely, that their orientation is horizontal, meaning the optical system’s rotation axis is parallel to the ground, so the sweeps don’t ensure precise capture of vertical elements. This arrangement is no longer used in cutting-edge systems, which typically feature the same “V” setup but with the two lasers tilted at an angle relative to the horizontal. The purpose of this tilt is to ensure the “slicing” plane formed by the laser cuts diagonally—not vertically—through the elements it encounters. If the cut is vertical, it’s impossible to guarantee that the representation of the start and end of vertical elements or surfaces is accurately positioned and defined. Additionally, these images again show video cameras rather than a photographic system, which is what the most powerful (and expensive) systems use.
Although this Nürburgring Nordschleife survey is a relatively recent project, we believe it involves a non-cutting-edge Mobile LS system that, like the previous one, doesn’t achieve the absolute metric precision and guarantees of the static system used by iRacing.
We’ve read on a forum that the iRacing team used one of these Mobile systems to survey the Imola circuit, but we lack further details and don’t know if this is true, what equipment they used exactly, or what results they obtained compared to the static system.
The Nürburgring Nordschleife survey is an atypical case. From what we’ve been able to gather, it wasn’t the simulator company that conducted the survey; rather, the circuit itself commissioned it and then offered it to simulators that want to incorporate it. This is a very smart move, as the circuit makes an investment that will undoubtedly boost its presence in the track market and attract other drivers or simracers to learn about and visit it to race there. We deduce they didn’t opt for the static system due to its greater slowness and track occupancy, especially given this is such a long (21 km) and topographically complex circuit. We also find it surprising that, for an investment of this magnitude, leading brands in Mobile Mapping Systems weren’t involved, but since we lack more data, we can’t comment further.
That said, it might seem that Mobile LS systems are less reliable than Static ones, but that’s not exactly what we’re trying to emphasize. As we mentioned earlier regarding static systems, the LS’s positional control must be precisely ensured along the route, and this aspect is even more delicate and complex to manage in mobile systems, which is why, if they aren’t equipped with top-quality complementary equipment, their topographic results can be questionable—perhaps valid for a simulation game, but not for a simulator aiming to also serve as a professional training tool.
Other Mobile LS
There are hybrid systems where the LS operates as a static unit but is transported on a vehicle that stops at regular intervals. These systems introduce even more uncertainties than the previous ones but have also been used by some racing games. We won’t provide images or further details, as the information is very scattered and could put some in a difficult position, but in many of these sources, there’s overly casual talk of millimeter precision.
There are also Mobile LS systems that do provide high-performance topographic guarantees. For example, Trimble’s MX2 system, which carries a complete setup: IMU and DMI systems, two GNSS systems, and a central photographic system, collectively enabling control and synchronization of all records, offering metric and positional guarantees in a mobile system.
Trimble isn’t the only one offering such equipment, but it’s one of the leading brands in this product line, and its MX2 is a clear example of a reliable Mobile LS system. Leica also has equipment for this range of services, the Pegasus.
(To be continued...)